RTOS内核 任务管理与调度
RTOS内核 任务管理与调度
多任务系统运行过程
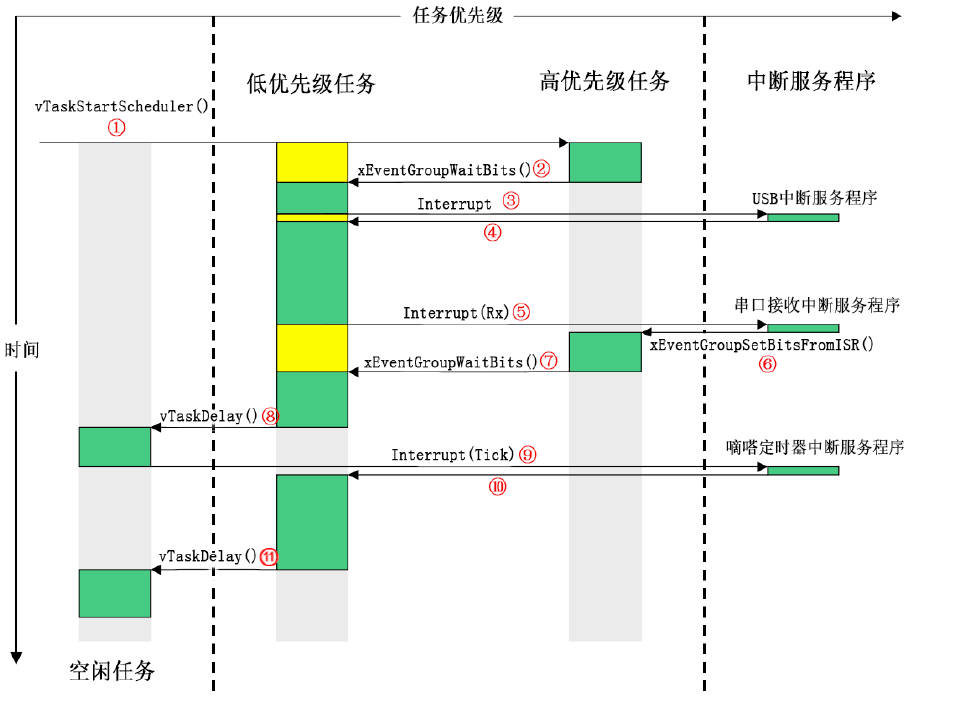
在多任务过程中,中断的响应的优先级是最高的,其次根据任务的优先级进行任务之间的调度,调用延迟函数vTaskDelay会使任务进入挂起状态。
- 启动RTOS,开启调度器(vTaskStartScheduler),执行高优先级任务
- 高优先级任务等待事件标志(xEventGroupWaitBits)被阻塞,低优先级任务得到执行。(任务被被阻塞,任务挂起,执行低优先级任务)
- 低优先级任务执行的过程中产生USB 中断,进入USB 中断服务程序。
- 退出USB 中断复位程序,回到低优先级任务继续执行。
- 低优先级任务执行过程中产生串口接收中断,进入串口接收中断服务程序。
- 退出串口接收中断复位程序,并发送事件标志设置消息(xEventGroupSetBitsFromISR),被阻塞的高优先级任务就会重新进入就绪状态,这个时候高优先级任务和低优先级任务都在就绪态,抢占式调度器就会让高优先级的任务先执行,所以此时就会进入高优先级任务。
- 高优先级任务由于等待事件标志(xEventGroupWaitBits)会再次被阻塞,低优先级任务开始继续执行。
- 低优先级任务调用函数vTaskDelay,低优先级任务被挂起,从而空闲任务得到执行。
- 空闲任务执行期间发生滴答定时器中断,进入滴答定时器中断服务程序。
- 退出滴答定时器中断,由于低优先级任务延时时间到,低优先级任务继续执行。
- 低优先级任务再次调用延迟函数vTaskDelay,低优先级任务被挂起,从而切换到空闲任务,空闲任务得到执行。
FreeRTOS 支持多任务运行的实时操作系统,具有时间片,抢占式和合作式三种调度方式。
RT-Thread调度方式:时间片轮转+优先级抢占式
任务栈相关概念
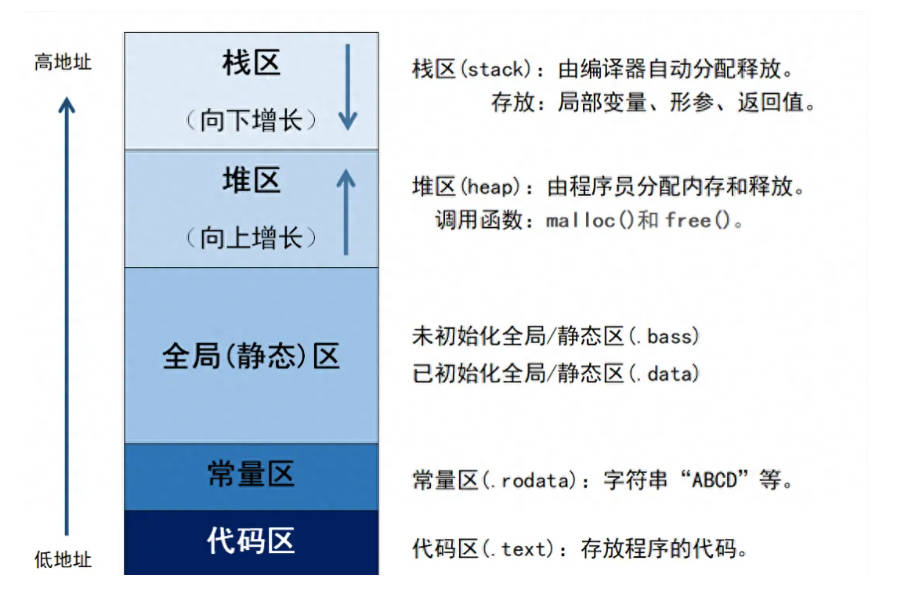
RTOS 编程,栈的分配大小都非常重要。局部变量,函数调用时的现场保护和返回地址,函数的形参,进入中断函数前和中断嵌套等都需要栈空间,栈空间定义小了会造成系统崩溃。
BSS段:BSS段(bss segment)通常是指用来存放程序中未初始化的全局变量的一块内存区域。BSS是英文Block Started by Symbol的简称。BSS段属于静态内存分配。
数据段:数据段(data segment)通常是指用来存放程序中已初始化的全局变量的一块内存区域。数据段属于静态内存分配。
代码段:代码段(code segment/text segment)通常是指用来存放程序执行代码的一块内存区域。这部分区域的大小在程序运行前就已经确定,并且内存区域通常属于只读, 某些架构也允许代码段为可写,即允许修改程序。在代码段中,也有可能包含一些只读的常数变量,例如字符串常量等。
堆(heap):堆是用于存放进程运行中被动态分配的内存段,它的大小并不固定,可动态扩张或缩减。当进程调用malloc等函数分配内存时,新分配的内存就被动态添加到堆上(堆被扩张);当利用free等函数释放内存时,被释放的内存从堆中被剔除(堆被缩减)
栈(stack):栈又称堆栈, 是用户存放程序临时创建的局部变量,也就是说我们函数括弧“{}”中定义的变量(但不包括static声明的变量,static意味着在数据段中存放变量)。除此以外,在函数被调用时,其参数也会被压入发起调用的进程栈中,并且待到调用结束后,函数的返回值也会被存放回栈中。由于栈的先进后出特点,所以栈特别方便用来保存/恢复调用现场。从这个意义上讲,我们可以把堆栈看成一个寄存、交换临时数据的内存区。它是由操作系统分配的,内存的申请与回收都由OS管理。
任务栈
static void AppTaskCreate (void)
{
xTaskCreate(vTaskTaskUserIF, /* 任务函数 */
"vTaskUserIF", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4 字节 */
NULL, /* 任务参数 */
1, /* 任务优先级*/
&xHandleTaskUserIF ); /* 任务句柄 */
xTaskCreate( vTaskTaskLED, /* 任务函数 */
"vTaskTaskLED", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4 字节 */
NULL, /* 任务参数 */
2, /* 任务优先级*/
&xHandleTaskLED ); /* 任务句柄 */
xTaskCreate( vTaskMsgPro, /* 任务函数 */
"vTaskMsgPro", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4 字节 */
NULL, /* 任务参数 */
3, /* 任务优先级*/
&xHandleTaskMsgPro ); /* 任务句柄 */
xTaskCreate( vTaskStart, /* 任务函数 */
"vTaskStart", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4 字节 */
NULL, /* 任务参数 */
4, /* 任务优先级*/
&xHandleTaskStart ); /* 任务句柄 */
}系统栈
而任务栈是不使用(启动文件里面描述 Stack_Size)空间的。任务栈不使用这里的栈空间,哪里使用这里的栈空间呢?答案就在中断函数和中断嵌套。
Stack_Size EQU 0x00000400
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp
; <h> Heap Configuration
; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8>
; </h>
Heap_Size EQU 0x00000400任务状态
Running 运行态
当任务处于实际运行状态被称之为运行态,即CPU 的使用权被这个任务占用。
Ready 就绪态
处于就绪态的任务是指那些能够运行(没有被阻塞和挂起),但是当前没有运行的任务,因为同优先级或更高优先级的任务正在运行。
Blocked 阻塞态
由于等待信号量,消息队列,事件标志组等而处于的状态被称之为阻塞态,另外任务调用延迟函数也会处于阻塞态。
Suspended 挂起态
类似阻塞态,通过调用函数vTaskSuspend()对指定任务进行挂起,挂起后这个任务将不被执行,只有调用函数xTaskResume()才可将这个任务从挂起态恢复。
任务的创建,删除,挂起,恢复
//任务创建
xTaskCreate(vTaskTaskUserIF, /* 任务函数 */
"vTaskUserIF", /* 任务名 */
512, /* 任务栈大小,单位word,也就是4 字节 */
NULL, /* 任务参数 */
1, /* 任务优先级*/
&xHandleTaskUserIF ); /* 任务句柄 */
//任务删除
vTaskDelete(xHandleTaskUserIF); /* 任务句柄 */
//任务挂起
vTaskSuspend(xHandleTaskUserIF); /* 任务句柄 */
//任务恢复
vTaskResume(xHandleTaskUserIF);/* 任务句柄 */
//FreeRTOS任务恢复(中断方式)
xTaskResumeFromISR(xHandleTaskUserIF)如果用往此vTaskDelete函数里面填的任务ID 是NULL,即数值0 的话,那么删除的就是当前正在执行的任务,此任务被删除后,FreeRTOS 会切换到任务就绪列表里面下一个要执行的最高优先级任务。
如果用往此vTaskSuspend函数里面填的任务ID 是NULL,即数值0 的话,那么挂起的就是当前正在执行的任务,此任务被挂起后,FreeRTOS 会切换到任务就绪列表里面下一个要执行的最高优先级任务。
在FreeRTOS 中,创建任务所需的内存需要在空闲任务中释放,如果用户在FreeRTOS 中调用了这个函数的话,一定要让空闲任务有执行的机会,否则这块内存是无法释放的。另外,创建的这个任务在使用中申请了动态内存,这个内存不会因为此任务被删除而删除,这一点要注意,一定要在删除前将此内存释放。
任务优先级
#define configMAX_PRIORITIES ( 5 )定义可供用户使用的最大优先级数,如果这个定义的是5,那么用户可以使用的优先级号是0,1,2,3,4,不包含5,要特别的注意。
用户配置任务的优先级数值越小,那么此任务的优先级越低(绝大多数的RTOS的优先级情况与之相反,数值越小,任务的优先级越高),空闲任务的优先级是 0。

任务信息统计
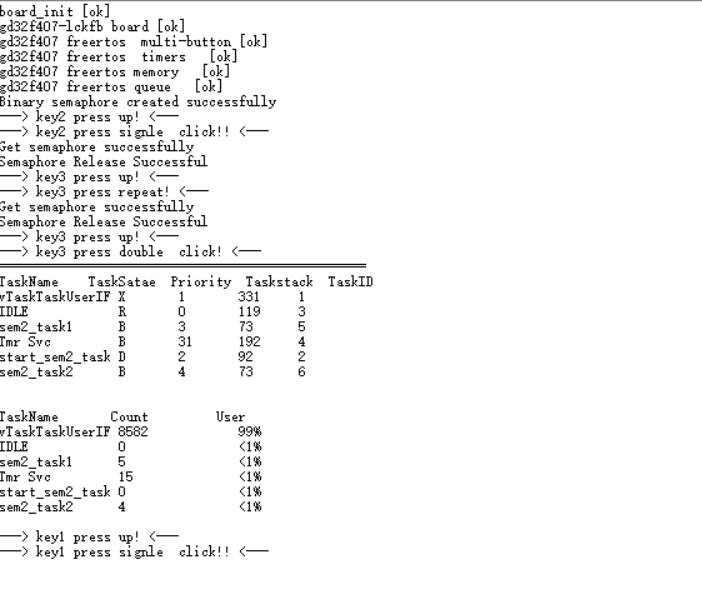
第一列: task name 即
xTaskCreate创建该 task 时第二个参数。 如果名称过长,会根据configMAX_TASK_NAME_LEN截断。第二列: task 当前状态
X: runningB: blockedR: readyD: deletedS: suspended
第三列: task 优先级 即
xTaskCreate创建该 task 时第四个参数。 数字越大,优先级越高,建议客户设置 task 优先级在 1-9 之间,慎行!第四列: 最小剩余 task 栈空间,字节为单位 在
xTaskCreate创建 task 时,给定的第三个参数值代表该 task 调度和运行过程中,最大可用 task 栈空间,以字节为单位(读者可以修改portSTACK_TYPE宏来决定是否以字节还是4字节为单位);Task如果 API 调用比较深,则使用的栈空间越大,也就意味着最小剩余 task 栈空间越小。高能预警,做好笔记,熟读三遍:
A:当某个 task 最小剩余 task 栈空间比较大时,适当减小xTaskCreate创建该 task 时给定的第三个参数值,可节约 DRAM,以优化系统内存。B:当某个 task 最小剩余 task 栈空间比较小时,适当增大xTaskCreate创建该 task 时给定的第三个参数值,可降低 task 栈溢出风险。C:如果对 SDK 没有深入了解,不要修改 系统 task 优先级和分配的最大可用栈空间。D:不要在系统 task 的 callback 函数里,添加过多代码,不要添加阻塞操作。 因为系统 task 通常都是经过优化配置的,如果代码深度较大,容易造成 task 栈溢出; 如果有阻塞操作,将导致该系统 task 接下来逻辑无法执行,甚至有死锁的可能。 例如: sniffer 的 callback 函数:wifi_promiscuous_cb_t cbWiFi callback 函数:system_event_cb_t cbE:减少应用代码 task 的个数,以优化内存。 例如: 多个socket数据流,可以通过select()放在同一个 task 里处理; 而不是一个socket数据流,一个 task; 更不要一个socket数据流,居然三个 task (接收 task, 发送 task, 处理 task), it is amazing!F:占用空间较大的变量,尽可能通过 malloc/calloc 等动态申请释放,以提高栈空间利用率。
任务调度
调度器就是使用相关的调度算法来决定当前需要执行的任务。所有的调度器有一个共同的特性: ◆ 调度器可以区分就绪态任务和挂起任务(由于延迟,信号量等待,邮箱等待,事件组等待等原因而使得任务被挂起)。 ◆ 调度器可以选择就绪态中的一个任务,然后激活它(通过执行这个任务)。当前正在执行的任务是运行态的任务。 ◆ 不同调度器之间最大的区别就是如何分配就绪态任务间的完成时间。 嵌入式实时操作系统的核心就是调度器和任务切换,调度器的核心就是调度算法。
调度算法
禁止使用时间片调度,那么每个任务必须配置不同的优先级。当FreeRTOS 多任务启动执行后,基本会按照如下的方式去执行
◆ 首先执行的最高优先级的任务Task1,Task1 会一直运行直到遇到系统阻塞式的API 函数,比如延迟,事件标志等待,信号量等待,Task1 任务会被挂起,也就是释放CPU 的执行权,让低优先级的任务得到执行。
◆ FreeRTOS 操作系统继续执行任务就绪列表中下一个最高优先级的任务Task2,Task2 执行过程中有两种情况:
◆ Task1 由于延迟时间到,接收到信号量消息等方面的原因,使得Task1 任务从挂起状态恢复到就绪态,在抢占式调度器的作用下,Task2 的执行会被Task1 抢占。
◆ Task2 会一直运行直到遇到系统阻塞式的API 函数,比如延迟,事件标志等待,信号量等待,Task2任务会被挂起,继而执行就绪列表中下一个最高优先级的任务。
◆ 如果用户创建了多个任务并且采用抢占式调度器的话,基本都是按照上面两条来执行。根据抢占式调度器,当前的任务要么被高优先级任务抢占,要么通过调用阻塞式API 来释放CPU 使用权让低优先级任务执行,没有用户任务执行时就执行空闲任务。
任务调度案例
Task1 的优先级为1,Task2 的优先级为2,Task3 的优先级为3。FreeRTOS 操作系统是设置的数值越小任务优先级越低,故Task3 的优先级最高,Task1 的优先级最低。
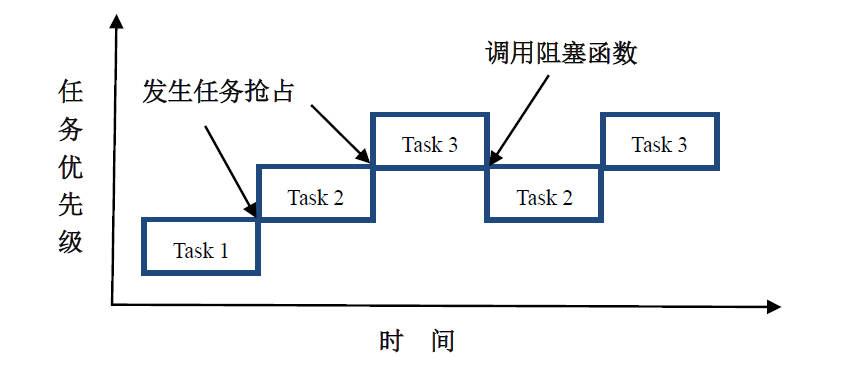
◆任务Task1 在运行中,运行过程中由于Task2 就绪,在抢占式调度器的作用下任务Task2 抢占Task1 的执行。Task2 进入到运行态,Task1 由运行态进入到就绪态。
◆ 任务Task2 在运行中,运行过程中由于Task3 就绪,在抢占式调度器的作用下任务Task3 抢占Task2的执行。Task3 进入到运行态,Task2 由运行态进入到就绪态。
◆ 任务Task3 运行过程中调用了阻塞式API 函数,比如vTaskDelay,任务Task3 被挂起,在抢占式调度器的作用下查找到下一个要执行的最高优先级任务是Task2,任务Task2 由就绪态进入到运行态。
◆ 任务Task2 在运行中,运行过程中由于Task3 再次就绪,在抢占式调度器的作用下任务Task3 抢占Task2 的执行。Task3 进入到运行态,Task2 由运行态进入到就绪态
时间片调度
时间片调度在同一任务优先级下。
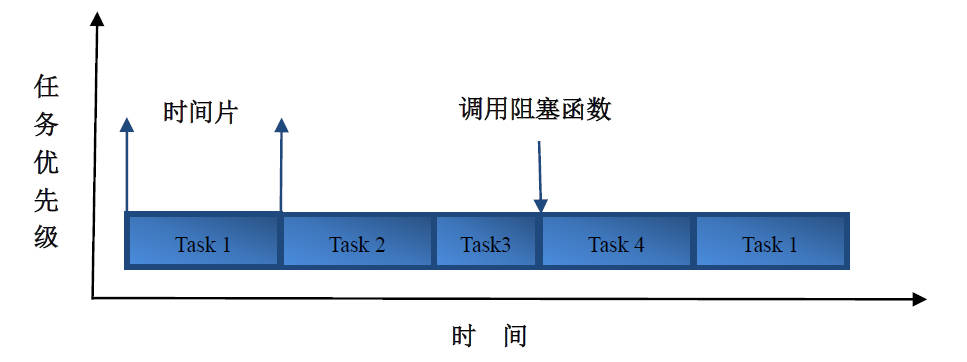
运行条件:
◆ 这里仅对时间片调度进行说明。
◆ 创建4 个同优先级任务Task1,Task2,Task3 和Task4。
◆ 每个任务分配的时间片大小是5 个系统时钟节拍。 运行过程描述如下:
◆ 先运行任务Task1,运行够5 个系统时钟节拍后,通过时间片调度切换到任务Task2。
◆ 任务Task2 运行够5 个系统时钟节拍后,通过时间片调度切换到任务Task3。
◆ 任务Task3 在运行期间调用了阻塞式API 函数,调用函数时,虽然5 个系统时钟节拍的时间片大小还没有用完,此时依然会通过时间片调度切换到下一个任务Task4。(注意,没有用完的时间片不会再使用,下次任务Task3 得到执行还是按照5 个系统时钟节拍运行)
◆ 任务Task4 运行够5 个系统时钟节拍后,通过时间片调度切换到任务Task1。